








Becca's ITP Sketchbook
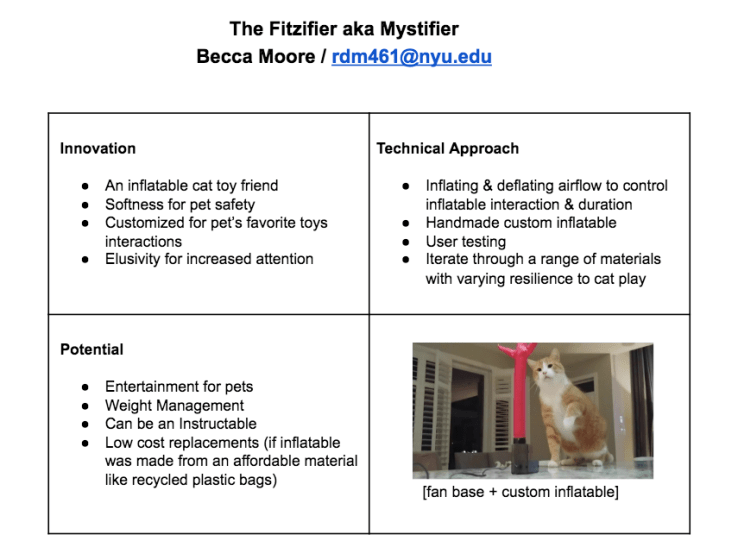
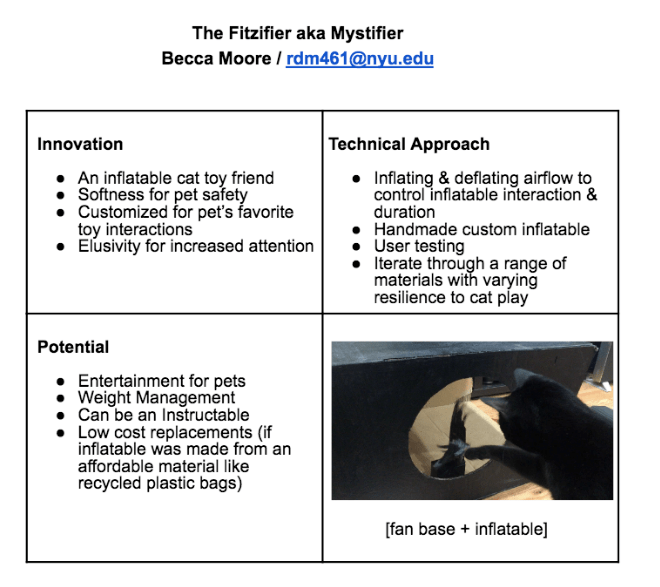
Do you want it to be a hand pumped mechanism or an automated experience?
Do you want it to function by itself?
What scale would you like?
Whats the air control connection?
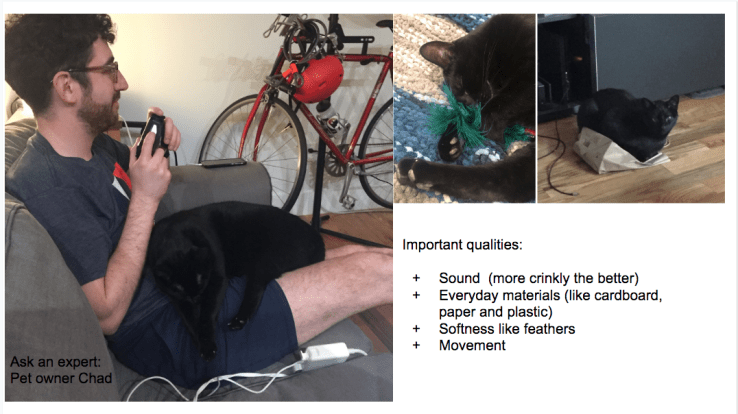
** pet safety **
How do You know when it works?
**temperature, time, pressure, cold clamp
***using alum to cool down






For this week we were to design our own mold. Being newer to 3D printing I knew i wanted to dive straight in at least with a cardboard prototype to solidify my understanding of some of the mold making techniques introduced in class last week.
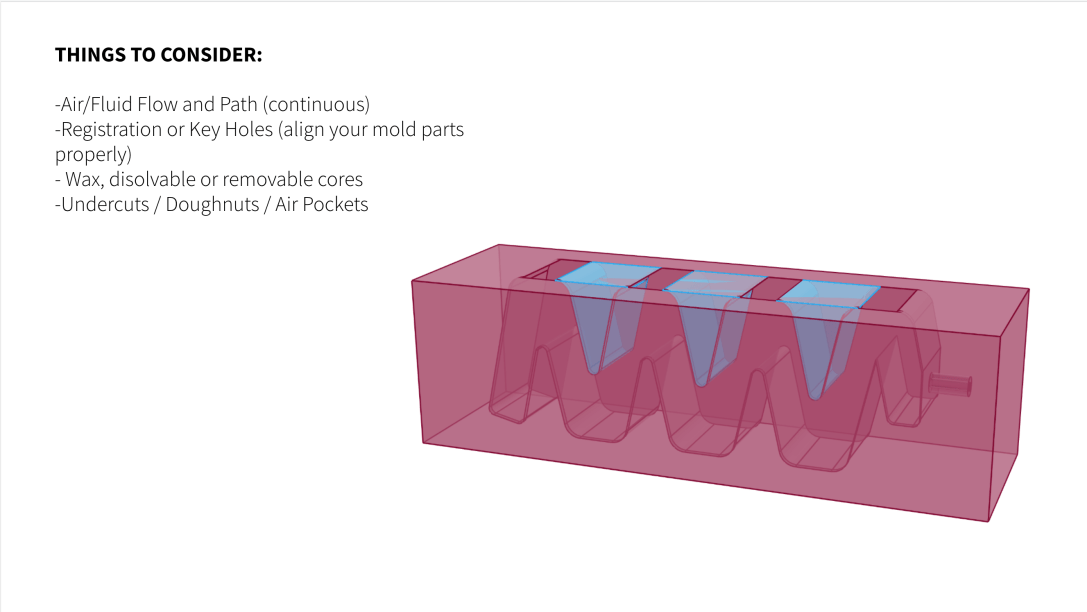
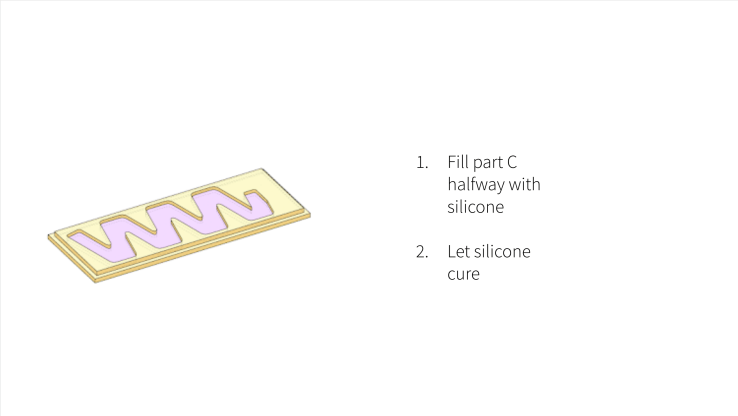
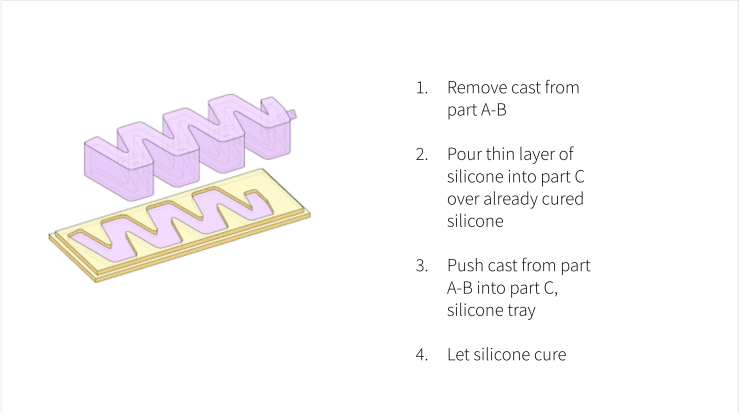
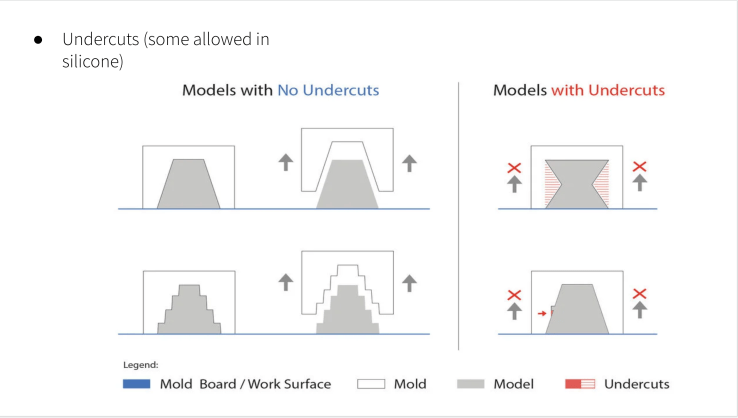
I just got trained on the 3d printers at Tandon and am excited for trying 3d printing in the future ❤ I decided to try the 3 part mold w/core, hoping to create a Starfish shaped grabber / inflatable actuator. I included the slides from class I was inspired to try below from Kari’s Week 4 lecture Introduction to Silicone Mold Design Concepts and Approaches
\
I ended up using more Silicone than I had hoped due to the cardboard walls leaning outwards and a leak in the center, maybe around 150 -180 vs 100, would definitely design a smaller mold for the next step.
Lessons Learned:
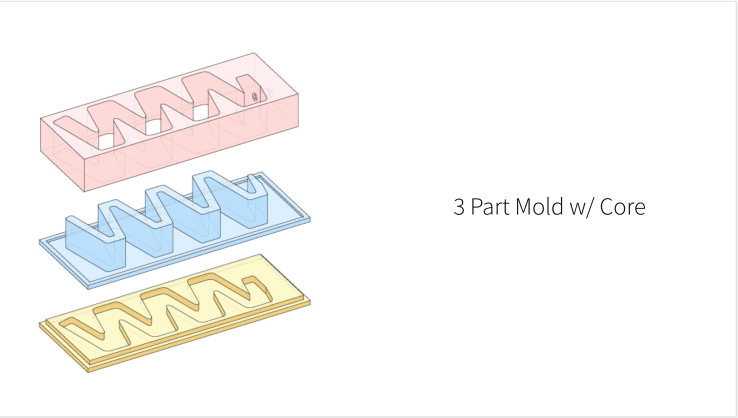
Thinking about a 3 part mold cast. Slides are from our Week 4 class with Kari love. See slide here 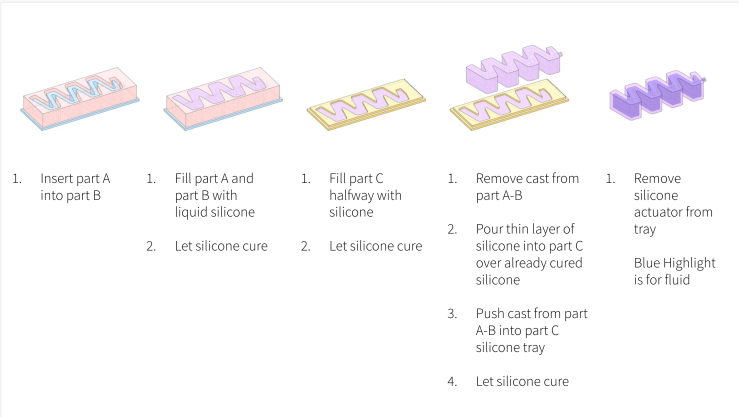



Week 4 Assignment
_______________________________________________________________________________________
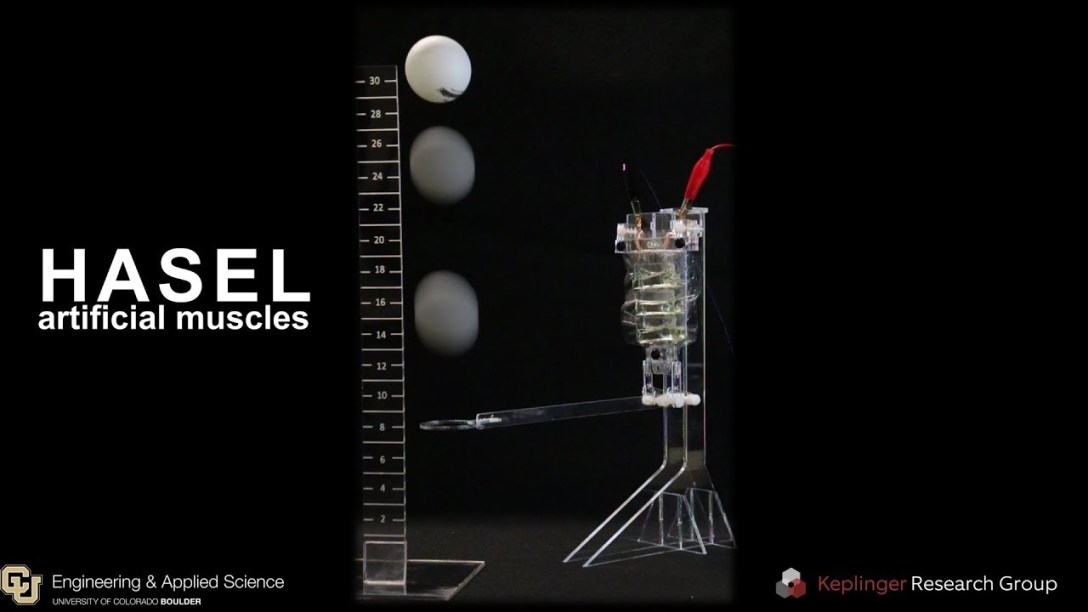
Hope to think about a HASEL actuator variation this week ❤ Still deciding what sounds fun for the final
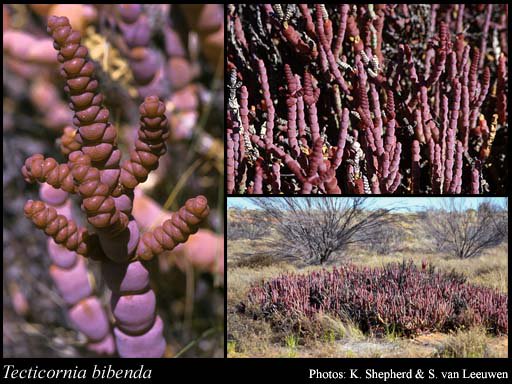

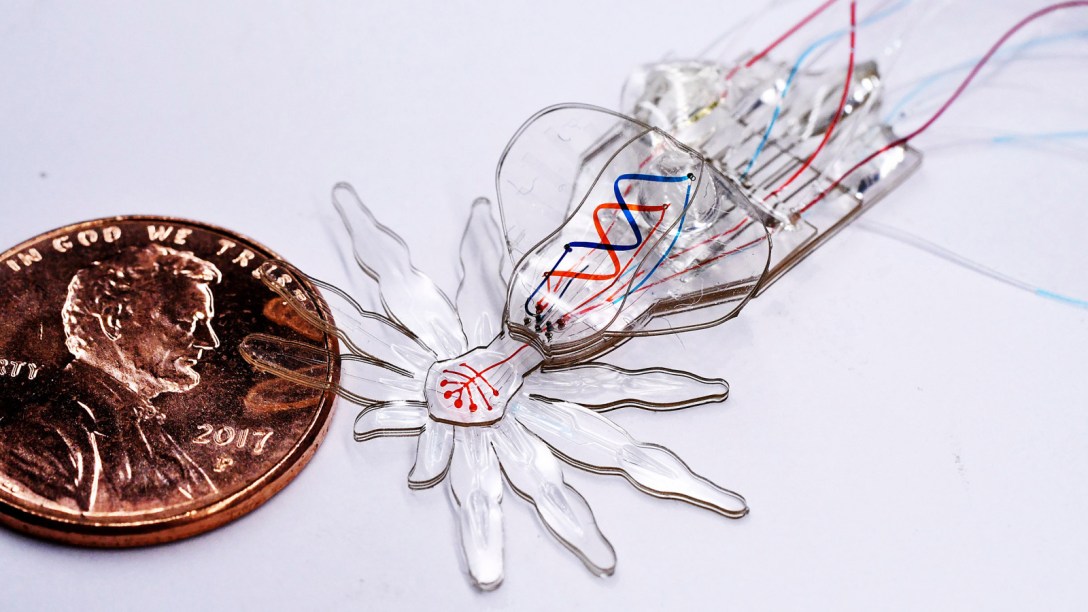
Hw: Cast a Bibenda – Simple Pneumatic Bending Actuator
Image Credit: Image the Western Australian Herbarium, Department of Biodiversity, Conservation and Attractions (https://florabase.dpaw.wa.gov.au/help/copyright).
“Newly-classified in 2007, Tecticornia Bibenda is a unique succulent native to Western Australia, and has been recognized as a plant particularly worthy of conservation and continued research. Its segmented stem frequently prompts comparison to the Michelin Man. The Bibenda Actuator’s relationship to this plant extends beyond the nod to the segmented bulbous shape, finding bio-inspiration from the mobility of plants, which move via hydraulic manipulation while most animals use muscle contraction. Usually plant hydraulic motion occurs as tissue-level adjustments of fluid (primarily water): for example, with the inside of a curve having less fluid, and the outside more. ” [chapter 10 Make:Soft Robotics ]
This weekend a few of us that were on the floor at the same time decided to join forces when we couldn’t find the right PVC size reserved from class (and after trying a local hardware store <3). Rachel, Madison, Gabriella & I went through the Bibenda pneumatic actuator tutorial round robin style, taking turns with each step / making sure we each understood & tried out all the tools. Matt was also in the area and reminded us how the Vacuum worked. Arnab who was in the room working on another project mentioned how he was excited to see the vacuum and that he had actually tried to make one himself one time. He mentioned that cellophane could be a good alternative as a material to help with future Silicone mold experiences.
Lessons Learned:














(pictures throughout process with Rachel, Madison & Gabriella – & a thank you to Matt for reminding us how to use the vacuum! We ended up using the remaining PVC from Matt & Ashley’s endeavors. We think either the class had already used the amount designated for the exercise, or maybe it had accidentally been placed into the junk shelf area after a previous group <3)


(Gabriella showing pix post removing from mold)

( learning how to use the Vacuum for the degassing stages)

(Madison pouring the A+B mixed Eco-Silicone mix into our mold from a distance to help with air bubbles)

(Rachel weighing & pouring the A+B mixture)

“This pneumatic bending actuator doesn’t have a specific job, but it’s a very good demonstration of how you can create a complex system with a minimal number of simple parts. It also serves as an on-ramp for working with cast silicone for robotics. The Bibenda can be cast in an afternoon, and its size and shape allow for bubbles to easily escape to the top for a clean casting. Another feature is the ease of demolding, which can serve as some early practice as you proceed to the more elaborate projects later in the book. This project can also be hooked up to the air power supply to be controlled digitally, or with a jumbo syringe filled with water to evoke the hydraulic motion of its namesake.
This design highlights the capabilities of using fabric to vary the amount of elasticity. By embedding fabric into the silicone to limit the stretch, we create zones of greater and lesser inflation. You can check out this concept as applied in RBO Hand’s PneuFlex actuators, where this kind of constrained area is referred to as the “passive layer” and includes embedded porous fabric. The PnueNet actuator developed by the Whitesides Research Group at Harvard takes advantage of what they call the “differential strain” effect to help achieve motions such as bending and twisting by using a paper layer to cause more rigidity. Similarly, a collaboration between UPenn and Cornell yielded an octopus-like skin by including fiber-mesh rings to make dynamic multidimensional motion.” – Chapter 10 Make:Soft Robotics
This past Monday we had the great experience of visiting Material ConneXion! and their sustainable materials library . It was such a great experience and perfect complement to our Wearables W9 class (Manufacturing + Crafting) that night as well where Loomia came in to talk us through their process. I was attracted to so many materials, and really after signing up for the student account got lost in their Material Library archive for a handful of hours. What a mindblowing resource! Around 8000 material items to learn from in their digital archive. I found myself tending to be attracted to materials that:





















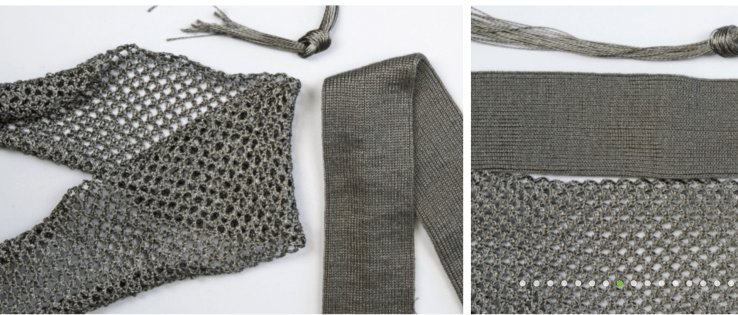
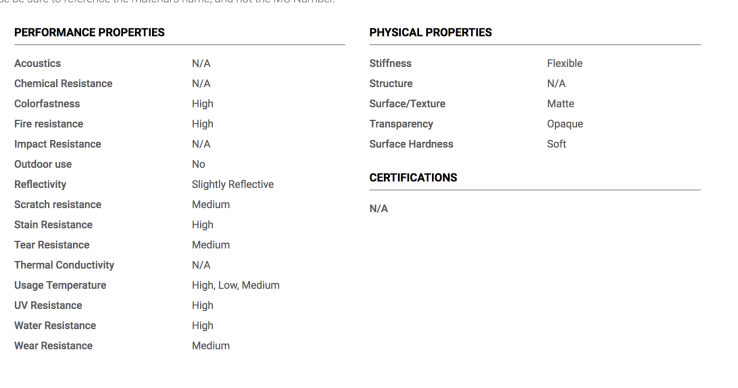
Soft Robotics & Wearables class have been complementing eachother in really nice ways. After our Wearables make up class on Friday covering various soft sensor crafting techniques, felt excited about reaching out to sources through Material ConneXion’s database for samples for knitting soft sensors:

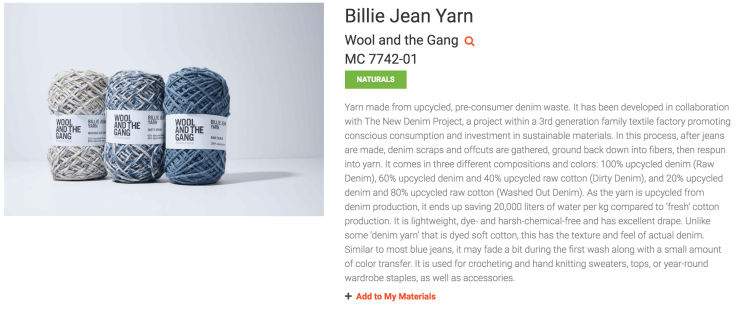


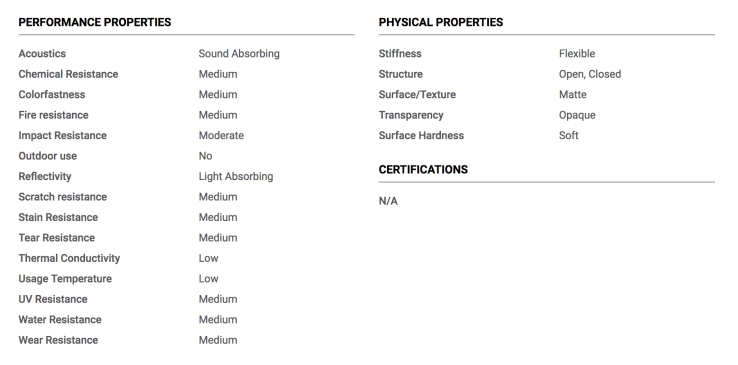
The Material ConneXion library is broken down into 8 different material categories:
More soon!


Originally for the assignment I started thinking about jellyfish both their phosphorescence and self-healing abilities. However, there’s a lot of current existing technology and applications centered around those qualities so tried to think a little more on another animal and came across the kangaroo rat ❤ It has an increased ability for water storage, having adapted to its desert climate. According to its wiki page there are a few qualities that play into its superwater storage ability are its kidneys, its back legs that allow it to bounce around large areas for high carb seeds that yield it water, and its skull anatomy.
I wonder if there’s a way to incorporate the structural understanding or its longer nasal cavities into housing for tech to keep it cooler or more moist. Thinking about the potential benefits of a counter- current exchange system.
“Desert kangaroo rats have the longest nasal cavity of all the kangaroo rats, which allows for better water conservation. Hot, dry air can remove water from the body. The long nasal cavities reduce this water loss by cooling the air leaving the lungs. Cooling air releases moisture for reabsorption to the body so its loss can be avoided in a situation where water is a precious resource.[5]”
__________________________________________________________________________________
Desert kangaroo rats have the longest nasal cavity of all the kangaroo rats, which allows for better water conservation. Hot, dry air can remove water from the body. The long nasal cavities reduce this water loss by cooling the air leaving the lungs. Cooling air releases moisture for reabsorption to the body so its loss can be avoided in a situation where water is a precious resource.[5]”

(slide from powerpoint presentation Illinois University )